内点法(Interior Point Method)是求解约束优化问题的重要方法之一,与惩罚函数外点法不同,内点法要求搜索点始终保持在可行域内部。其基本思想是通过构造障碍函数(Barrier Function)来替代约束条件,将约束优化问题转化为无约束优化问题,同时确保迭代点始终在可行域内部。
一、非线性规划模型
\[\begin{cases} \min & f(\boldsymbol{x}) \\ \text{s.t.} & g_i(\boldsymbol{x}) \leq 0,\quad i=1,\dots,p \\ & h_j(\boldsymbol{x}) = 0,\quad j=1,\dots,q \end{cases}\]其中,$f(\boldsymbol{x})$、$g_i(\boldsymbol{x})(i=1,2,\dots,p)$ 和 $h_j(\boldsymbol{x})(j=1,2,\dots,q)$ 是$\mathbb{R}^n$ 上的连续函数。
注意:内点法主要处理不等式约束,等式约束通常通过其他方法处理或转化为不等式约束。
二、内点法基本原理
内点法的核心思想:通过构造障碍函数将约束问题转化为无约束问题,同时确保搜索点始终在可行域内部。与外点法不同,内点法要求迭代点必须满足所有约束条件。
内点法可视化说明
graph TD
A["初始点 x0<br/>必须在可行域内"] --> B["构造障碍函数<br/>φ(x,r) = f(x) + r·B(x)"]
B --> C["求解无约束优化<br/>min φ(x,r)"]
C --> D["得到新点 x(k+1)<br/>仍在可行域内"]
D --> E{"收敛?"}
E -->|否| F["减小障碍参数 r<br/>r(k+1) = r(k)/C"]
F --> G["更新迭代点"]
G --> B
E -->|是| H["得到最优解 x*"]
style A fill:#dcedc8
style H fill:#c8e6c9
style D fill:#dcedc8
style F fill:#fff3e0
内点法特点:
- 🟢 绿色区域:可行域(所有约束满足)
- 🔴 红色区域:不可行域(约束违反)
- 📍 搜索路径:始终在可行域内部移动
- ⚡ 障碍机制:通过障碍函数防止点接近约束边界
几何直观理解
graph LR
subgraph "搜索空间"
A["可行域内部<br/>g(x) < 0<br/>障碍项 > 0"]
B["约束边界<br/>g(x) = 0<br/>障碍项 → ∞"]
C["不可行域<br/>g(x) > 0<br/>算法不允许"]
end
D["初始点<br/>必须在可行域内"] --> E["计算障碍函数<br/>φ(x) = f(x) + r·B(x)"]
E --> F["无约束优化<br/>min φ(x)"]
F --> G["新迭代点<br/>仍在可行域内"]
G --> H{"收敛?"}
H -->|否| I["减小r<br/>减弱障碍"]
I --> E
H -->|是| J["最优解<br/>在可行域内"]
style A fill:#dcedc8
style B fill:#fff3e0
style C fill:#ffcdd2
style D fill:#dcedc8
style J fill:#c8e6c9
关键理解:
- 内点法要求搜索点始终在可行域内部
- 通过障碍函数防止点接近约束边界
- 随着障碍参数r减小,搜索点逐渐逼近约束边界
- 最终收敛到约束边界上的最优解
内点法可视化
下图展示了内点法的基本概念和收敛过程:
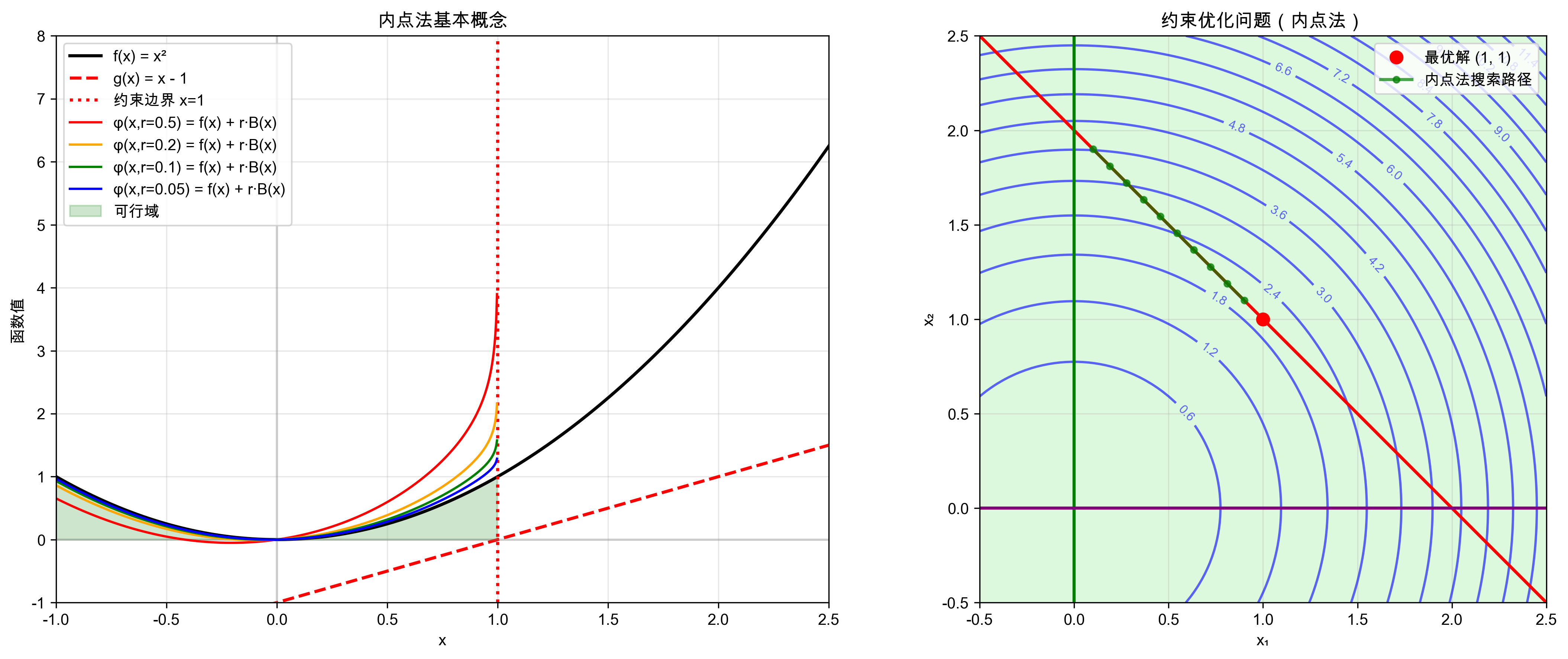
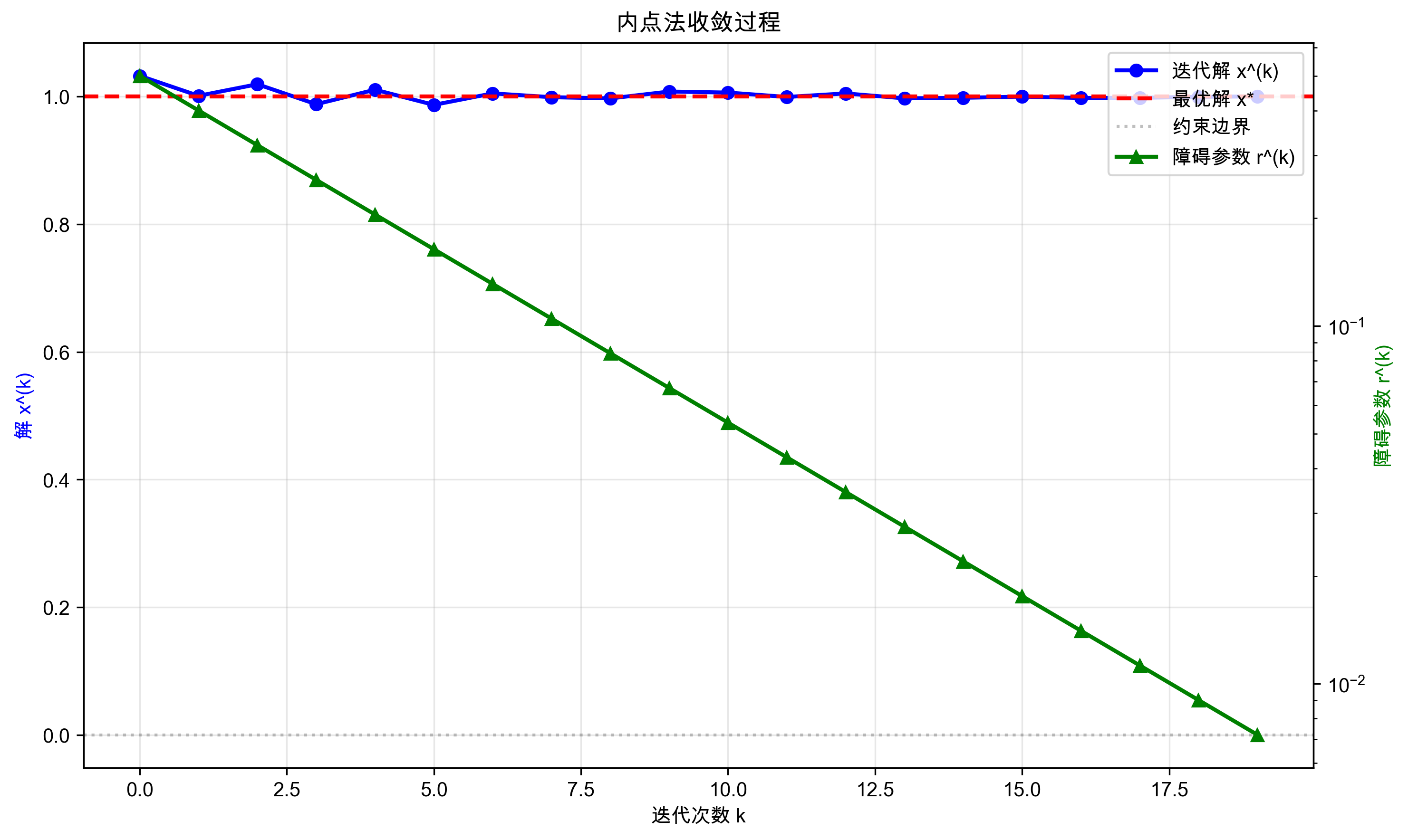
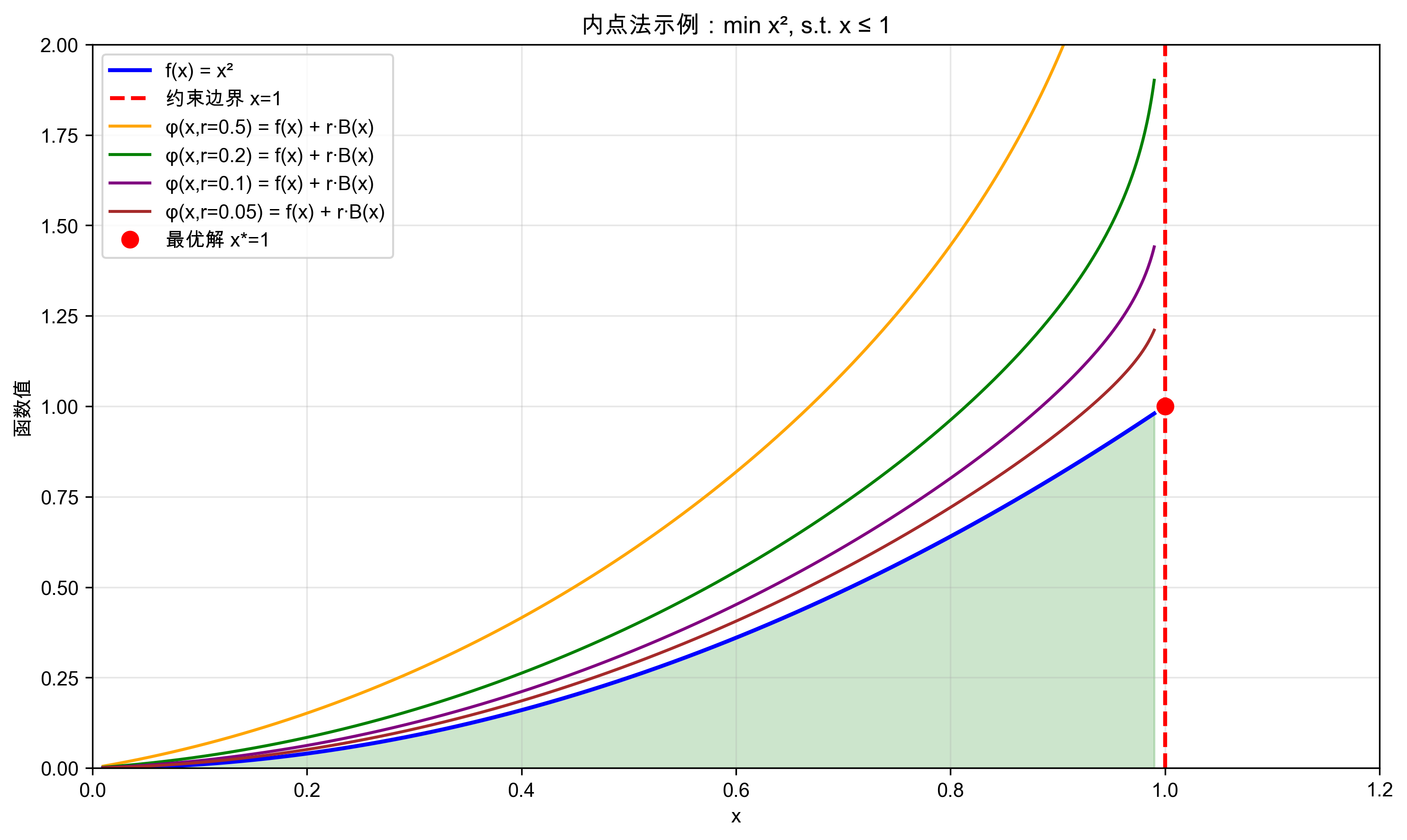
图片说明:
- 左图:展示不同障碍参数r对障碍函数形状的影响,随着r减小,最优解逐渐逼近约束边界
- 中图:显示算法收敛过程,迭代解始终在可行域内,障碍参数按指数减小
- 右图:简单示例,验证内点法的基本原理
障碍函数为:
\[\phi(\boldsymbol{x}, r^{(k)}) = f(\boldsymbol{x}) + r^{(k)} \sum_{i=1}^{p} B(g_i(\boldsymbol{x}))\]其中,$B(g_i(\boldsymbol{x}))$ 是障碍函数,常用的形式有:
对数障碍函数: \(B(g_i(\boldsymbol{x})) = -\log(-g_i(\boldsymbol{x}))\)
倒数障碍函数: \(B(g_i(\boldsymbol{x})) = -\frac{1}{g_i(\boldsymbol{x})}\)
其中,$r^{(k)}$ 为趋于零的严格递减正数列,$r^{(k)} = \frac{r^{(k-1)}}{C}$ 且 $C>1$,$\lim_{k\to\infty} r^{(k)} = 0$。
三、应用
例题1:简单不等式约束问题
题目: 用内点法求解以下约束优化问题:
\[\begin{cases} \min & f(x) = x^2 \\ \text{s.t.} & g(x) = x - 1 \leq 0 \end{cases}\]解答:
-
构造障碍函数: 使用对数障碍函数:$\phi(x, r) = x^2 + r \cdot (-\log(1-x))$
-
分情况讨论:
情况1: 当 $x < 1$ 时(满足约束)
$\phi(x, r) = x^2 + r \cdot (-\log(1-x))$情况2: 当 $x \geq 1$ 时(违反约束)
障碍函数无定义,算法不允许 -
求无约束极值:
对 $\phi(x, r)$ 关于 $x$ 求导:
$\frac{d\phi}{dx} = 2x + r \cdot \frac{1}{1-x} = 0$整理得:$2x(1-x) + r = 0$
$2x - 2x^2 + r = 0$
$2x^2 - 2x - r = 0$解得:$x = \frac{2 \pm \sqrt{4 + 8r}}{4} = \frac{1 \pm \sqrt{1 + 2r}}{2}$
由于 $x < 1$,取负号:$x^* = \frac{1 - \sqrt{1 + 2r}}{2}$
-
分析收敛性:
当 $r \to 0$ 时: $x^* = \frac{1 - \sqrt{1 + 2r}}{2} \to \frac{1 - 1}{2} = 0$但这不是最优解。重新分析:当 $r \to 0$ 时,障碍项的影响减小,最优解应接近约束边界 $x = 1$。
例题2:多约束问题
题目: 用内点法求解
\[\begin{cases} \min & f(x_1, x_2) = x_1^2 + x_2^2 \\ \text{s.t.} & g_1(x_1, x_2) = x_1 + x_2 - 2 \leq 0 \\ & g_2(x_1, x_2) = -x_1 \leq 0 \\ & g_3(x_1, x_2) = -x_2 \leq 0 \end{cases}\]解答:
-
构造障碍函数: $\phi(x_1, x_2, r) = x_1^2 + x_2^2 + r[-\log(2-x_1-x_2) - \log(x_1) - \log(x_2)]$
-
求偏导数: $\frac{\partial \phi}{\partial x_1} = 2x_1 + r\left[\frac{1}{2-x_1-x_2} - \frac{1}{x_1}\right] = 0$
$\frac{\partial \phi}{\partial x_2} = 2x_2 + r\left[\frac{1}{2-x_1-x_2} - \frac{1}{x_2}\right] = 0$ -
分析对称性: 由于目标函数和约束都关于 $x_1, x_2$ 对称,最优解应满足 $x_1 = x_2$。
-
求解: 设 $x_1 = x_2 = t$,则约束变为 $2t \leq 2$,即 $t \leq 1$。
障碍函数变为: $\phi(t, r) = 2t^2 + r[-\log(2-2t) - 2\log(t)]$
求导:$\frac{d\phi}{dt} = 4t + r\left[\frac{2}{2-2t} - \frac{2}{t}\right] = 0$
整理得:$4t + 2r\left[\frac{1}{1-t} - \frac{1}{t}\right] = 0$
-
求极限: 当 $r \to 0$ 时,$t \to 1$,因此 $x_1^* = x_2^* = 1$,最优值为 $f^* = 2$。
例题3:等式约束问题
题目: 用内点法求等式约束问题
\[\begin{cases} \min & f(x_1, x_2) = x_1^2 + x_2^2 \\ \text{s.t.} & h(x_1, x_2) = x_1 + x_2 - 2 = 0 \end{cases}\]解答:
-
将等式约束转化为不等式约束: $x_1 + x_2 - 2 = 0$ 等价于 $x_1 + x_2 - 2 \leq 0$ 且 $-(x_1 + x_2 - 2) \leq 0$
-
构造障碍函数: $\phi(x_1, x_2, r) = x_1^2 + x_2^2 + r[-\log(2-x_1-x_2) - \log(x_1+x_2-2)]$
-
注意: 内点法处理等式约束比较复杂,通常建议使用其他方法如拉格朗日乘数法。
四、参数选择与算法步骤
参数选择
初始点 $x^{(0)}$: 必须在可行域内部,即 $g_i(x^{(0)}) < 0$ 对所有 $i$ 成立。
初始障碍参数 $r^{(0)}$: 选择对算法的成败和计算效率有显著影响。
- 选取过大:障碍项占主导地位,收敛到可行域中心而非边界
- 选取过小:数值计算困难,可能接近约束边界时出现数值问题
障碍参数递减系数 $C$: 一般取 $C \in [2, 10]$
算法步骤
内点法的详细步骤:
-
选择初始点 $x^{(0)}$,确保 $g_i(x^{(0)}) < 0$ 对所有 $i$ 成立
-
选取初始障碍参数 $r^{(0)} > 0$,递减系数 $C > 1$,并置 $k = 0$
-
求解无约束优化问题 $\min \phi(x, r^{(k)})$,得到最优点 $x_k^*$
-
当 $k = 0$ 时转步骤5,否则转步骤6
-
置 $k = k + 1$,$r^{(k+1)} = \frac{r^{(k)}}{C}$,$x_{k+1}^{(0)} = x_k^*$
-
由终止准则,若满足则结束算法,输出最优解;否则转步骤5
五、算法步骤总结
内点法的一般步骤:
-
初始化: 选择初始点 $\boldsymbol{x}^{(0)}$(必须在可行域内),初始障碍参数 $r^{(0)} > 0$,递减因子 $C > 1$,精度要求 $\varepsilon > 0$,置 $k = 0$。
-
构造障碍函数:
$\phi(\boldsymbol{x}, r^{(k)}) = f(\boldsymbol{x}) + r^{(k)} \sum_{i=1}^{p} B(g_i(\boldsymbol{x}))$ -
求解无约束优化问题:
$\boldsymbol{x}^{(k+1)} = \arg\min_{\boldsymbol{x}} \phi(\boldsymbol{x}, r^{(k)})$ -
检验收敛性: 若满足收敛准则,停止;否则转步骤5。
-
更新障碍参数: $r^{(k+1)} = \frac{r^{(k)}}{C}$,置 $k = k+1$,转步骤2。
收敛准则:
- $|\boldsymbol{x}^{(k+1)} - \boldsymbol{x}^{(k)}| < \varepsilon$
- 或障碍项足够小:$r^{(k)} \sum_{i=1}^{p} B(g_i(\boldsymbol{x}^{(k+1)})) < \varepsilon$
算法特点:
- 内点法保证搜索点始终在可行域内部
- 适用于包含不等式约束的优化问题
- 对目标函数的凹凸性没有要求
- 数值稳定性较好,但初始点选择要求严格
- 收敛速度通常比外点法快
注意事项:
- 初始点必须在可行域内部
- 等式约束需要特殊处理
- 接近约束边界时可能出现数值问题
- 障碍函数的选择对算法性能有重要影响
六、内点法 vs 外点法
| 特性 | 内点法 | 外点法 |
|---|---|---|
| 搜索范围 | 可行域内部 | 可行域和不可行域 |
| 初始点要求 | 必须在可行域内 | 任意点均可 |
| 约束处理 | 不等式约束为主 | 等式和不等式约束 |
| 收敛速度 | 通常较快 | 相对较慢 |
| 数值稳定性 | 较好 | 一般 |
| 实现难度 | 中等 | 较简单 |
选择建议:
- 如果初始点容易找到且问题主要是不等式约束,选择内点法
- 如果问题包含等式约束或初始点难以确定,选择外点法
- 对于大规模问题,内点法通常更高效