KKT条件(Karush-Kuhn-Tucker条件)是约束优化理论中最重要的最优性条件之一。它提供了在约束条件下判断局部最优解的必要条件,是拉格朗日乘数法的推广。本文将从几何直观出发,深入讲解KKT条件的理论基础、几何意义和实际应用。
一、KKT条件的背景
1.1 从拉格朗日乘数法到KKT条件
在无约束优化问题中,我们通过梯度为零来寻找最优解: \(\nabla f(x^*) = 0\)
对于等式约束问题: \(\begin{align} \min \quad & f(x) \\ \text{s.t.} \quad & h_i(x) = 0, \quad i = 1, \ldots, m \end{align}\)
拉格朗日乘数法告诉我们,在最优解处存在乘子 $\lambda_i$ 使得: \(\nabla f(x^*) + \sum_{i=1}^m \lambda_i \nabla h_i(x^*) = 0\)
KKT条件将这一思想推广到包含不等式约束的一般约束优化问题。
1.2 约束优化问题的标准形式
考虑一般约束优化问题: \(\begin{align} \min \quad & f(x) \\ \text{s.t.} \quad & g_i(x) \leq 0, \quad i = 1, \ldots, p \\ & h_j(x) = 0, \quad j = 1, \ldots, q \end{align}\)
其中:
- $f: \mathbb{R}^n \to \mathbb{R}$ 是目标函数
- $g_i: \mathbb{R}^n \to \mathbb{R}$ 是不等式约束函数
- $h_j: \mathbb{R}^n \to \mathbb{R}$ 是等式约束函数
二、KKT条件的数学表述
2.1 KKT条件的内容
设 \(x^*\) 是约束优化问题的局部最优解,且满足线性无关约束条件(LICQ),则存在拉格朗日乘子 \(\lambda_i^* \geq 0\) 和 \(\nu_j^*\) 使得:
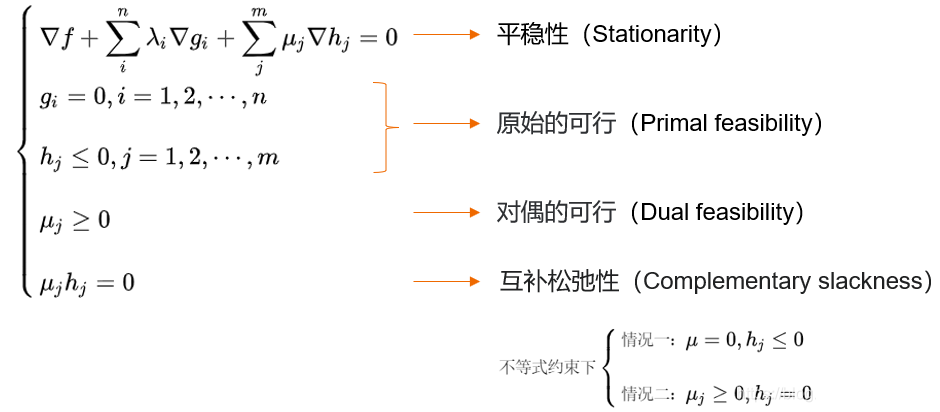
1. 平稳性条件(Stationarity)(驻点条件): \(\nabla f(x^*) + \sum_{i=1}^p \lambda_i^* \nabla g_i(x^*) + \sum_{j=1}^q \nu_j^* \nabla h_j(x^*) = 0\)
👉 目标函数的梯度,被约束的“拉力”平衡住了。
2. 原始可行性(Primal Feasibility): \(g_i(x^*) \leq 0, \quad i = 1, \ldots, p\) \(h_j(x^*) = 0, \quad j = 1, \ldots, q\)
👉 解必须在可行域内。
3. 对偶可行性(Dual Feasibility): \(\lambda_i^* \geq 0, \quad i = 1, \ldots, p\)
👉 不等式约束的“罚力度”不能为负。
4. 互补松弛性(Complementary Slackness): \(\lambda_i^* g_i(x^*) = 0, \quad i = 1, \ldots, p\)
👉 如果约束没“卡住”($g_i(x^)<0$),它的乘子$\lambda$必须=0; 如果约束正好“贴住”($g_i(x^)=0$),它的乘子$\lambda$可以> 0。
直观理解就是: 👉 最优点的梯度被一部分约束”抵消”,最终解要么在内部(无约束情况),要么在边界(激活约束起作用.
三、KKT条件的几何意义
3.1 几何直观
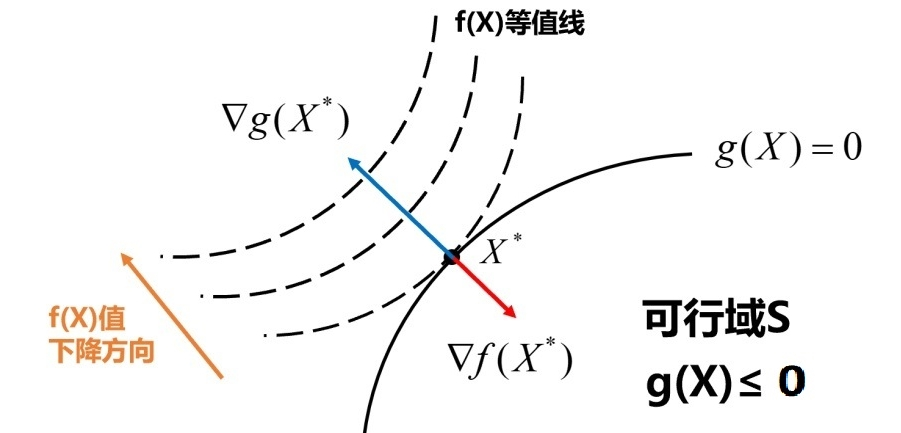
KKT条件的几何意义可以通过以下方式理解:
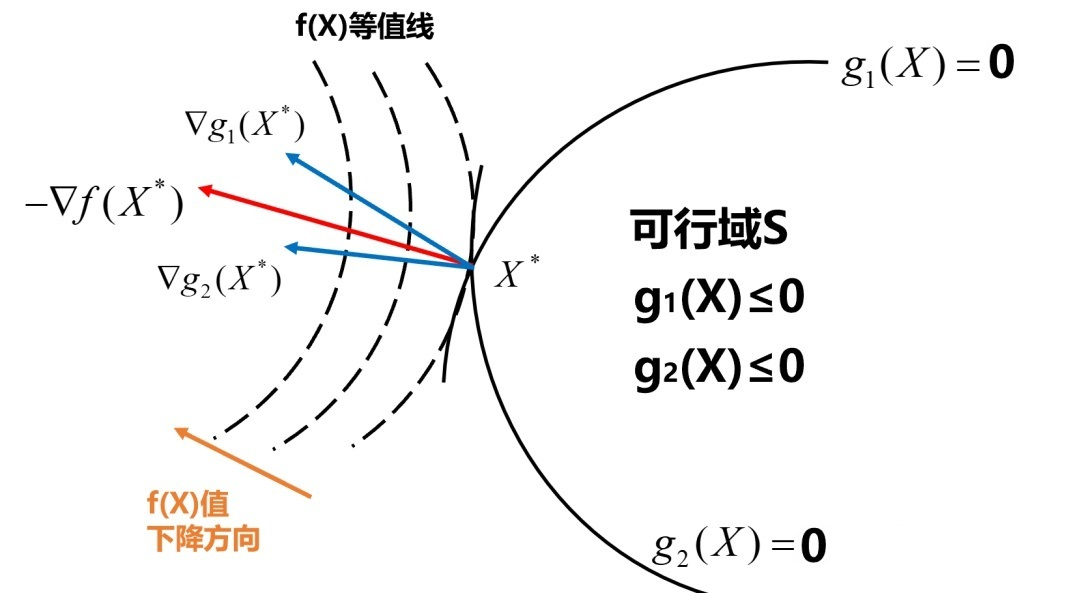
在最优解处,目标函数的梯度可以表示为约束函数梯度的非负线性组合。
具体来说:
- 对于起作用的不等式约束(激活约束)(\(g_i(x^*) = 0\)),其梯度 \(\nabla g_i(x^*)\) 指向可行域外部
- 对于不起作用的不等式约束(非激活约束)(\(g_i(x^*) < 0\)),对应的乘子 \(\lambda_i^* = 0\)
- 对于等式约束(始终是激活的),梯度 \(\nabla h_j(x^*)\) 垂直于约束曲面
3.2 几何解释的数学表述
设 \(\mathcal{A}(x^*) = \{i : g_i(x^*) = 0\}\) 为在 \(x^*\) 处起作用的约束集合,则KKT条件可以写成:
\[\nabla f(x^*) + \sum_{i \in \mathcal{A}(x^*)} \lambda_i^* \nabla g_i(x^*) + \sum_{j=1}^q \nu_j^* \nabla h_j(x^*) = 0\]其中 $\lambda_i^* \geq 0$ 对所有 $i \in \mathcal{A}(x^*)$。
四、约束条件(”正则点”)
4.1 线性无关约束条件(LICQ)
定义:在点 $x^*$ 处,所有起作用约束的梯度线性无关,即:线性无关。 \(\{\nabla g_i(x^*) : i \in \mathcal{A}(x^*)\} \cup \{\nabla h_j(x^*) : j = 1, \ldots, q\}\)
重要性:LICQ是KKT条件成立的必要条件。如果不满足LICQ,KKT条件可能不成立。
4.2 其他约束条件
除了LICQ,还有其他约束条件可以保证KKT条件的成立:
- Mangasarian-Fromovitz条件(MFCQ):比起LICQ稍微弱一些,要求等式约束梯度线性无关,并且在一个方向能“离开”激活约束。
- 线性独立约束条件(LICQ) :在点$x*$所有激活的不等式约束的梯度 \(\nabla g_i(x^*)\) 和等式约束的梯度$\nabla h_j(x^*)$必须线性无关。
- Slater条件(对于凸优化问题) :如果问题是凸的,只要存在一个严格可行点(即$g_i(x) < 0 且h_j(x) = 0$),则满足正则条件。
五、KKT条件的应用实例
例1:简单的二次规划问题
问题: \(\begin{align} \min \quad & f(x_1, x_2) = x_1^2 + x_2^2 \\ \text{s.t.} \quad & g_1(x_1, x_2) = x_1 + x_2 - 1 \leq 0 \\ & g_2(x_1, x_2) = -x_1 \leq 0 \\ & g_3(x_1, x_2) = -x_2 \leq 0 \end{align}\)
解:
步骤1:构造拉格朗日函数 \(L(x_1, x_2, \lambda_1, \lambda_2, \lambda_3) = x_1^2 + x_2^2 + \lambda_1(x_1 + x_2 - 1) - \lambda_2 x_1 - \lambda_3 x_2\)
步骤2:写出KKT条件 \(\begin{cases} \frac{\partial L}{\partial x_1} = 2x_1 + \lambda_1 - \lambda_2 = 0 \\ \frac{\partial L}{\partial x_2} = 2x_2 + \lambda_1 - \lambda_3 = 0 \\ x_1 + x_2 - 1 \leq 0, \quad -x_1 \leq 0, \quad -x_2 \leq 0 \\ \lambda_1 \geq 0, \quad \lambda_2 \geq 0, \quad \lambda_3 \geq 0 \\ \lambda_1(x_1 + x_2 - 1) = 0, \quad \lambda_2 x_1 = 0, \quad \lambda_3 x_2 = 0 \end{cases}\)
步骤3:分析约束的起作用情况
由于目标函数是 $x_1^2 + x_2^2$,最优解应该在可行域内距离原点最近的点。
情况1:如果 $x_1 > 0, x_2 > 0$,则 $\lambda_2 = \lambda_3 = 0$
- 如果 $x_1 + x_2 < 1$,则 $\lambda_1 = 0$,得到 $x_1 = x_2 = 0$,但这不满足 $x_1 > 0, x_2 > 0$
- 如果 $x_1 + x_2 = 1$,则 $\lambda_1 > 0$,得到 $x_1 = x_2 = \frac{1}{2}$
情况2:如果 $x_1 = 0, x_2 > 0$,则 $\lambda_2 \geq 0, \lambda_3 = 0$
- 如果 $x_2 < 1$,则 $\lambda_1 = 0$,得到 $x_2 = 0$,矛盾
- 如果 $x_2 = 1$,则 $\lambda_1 > 0$,得到 $x_1 = 0, x_2 = 1$
情况3:如果 $x_1 > 0, x_2 = 0$,类似分析得到 $x_1 = 1, x_2 = 0$
情况4:如果 $x_1 = 0, x_2 = 0$,则 $\lambda_2 \geq 0, \lambda_3 \geq 0$
步骤4:比较目标函数值
- $f(0, 0) = 0$
- $f(\frac{1}{2}, \frac{1}{2}) = \frac{1}{2}$
- $f(0, 1) = 1$
- $f(1, 0) = 1$
结论:最优解为 $x^* = (0, 0)$,对应的乘子为 $\lambda_1^* = 0, \lambda_2^* = 0, \lambda_3^* = 0$。
例2:带等式约束的问题
问题: \(\begin{align} \min \quad & f(x_1, x_2) = x_1^2 + x_2^2 \\ \text{s.t.} \quad & h(x_1, x_2) = x_1 + x_2 - 1 = 0 \end{align}\)
解:
步骤1:构造拉格朗日函数 \(L(x_1, x_2, \nu) = x_1^2 + x_2^2 + \nu(x_1 + x_2 - 1)\)
步骤2:写出KKT条件 \(\begin{cases} \frac{\partial L}{\partial x_1} = 2x_1 + \nu = 0 \\ \frac{\partial L}{\partial x_2} = 2x_2 + \nu = 0 \\ x_1 + x_2 - 1 = 0 \end{cases}\)
步骤3:求解 从前两个方程得:$x_1 = x_2 = -\frac{\nu}{2}$ 代入第三个方程:$-\frac{\nu}{2} - \frac{\nu}{2} = 1$,得 $\nu = -1$ 因此:$x_1 = x_2 = \frac{1}{2}$
结论:最优解为 $x^* = (\frac{1}{2}, \frac{1}{2})$,对应的乘子为 $\nu^* = -1$。
例3:复杂的约束优化问题
问题: \(\begin{align} \min \quad & f(x_1, x_2) = x_1^2 + 2x_2^2 - 4x_1 - 4x_2 \\ \text{s.t.} \quad & g_1(x_1, x_2) = x_1 + x_2 - 3 \leq 0 \\ & g_2(x_1, x_2) = -x_1 - 2x_2 + 5 \leq 0 \end{align}\)
解:
步骤1:构造
步骤2:写出KKT条件 \(\begin{cases} \frac{\partial L}{\partial x_1} = 2x_1 - 4 + \lambda_1 - \lambda_2 = 0 \\ \frac{\partial L}{\partial x_2} = 4x_2 - 4 + \lambda_1 - 2\lambda_2 = 0 \\ x_1 + x_2 - 3 \leq 0, \quad -x_1 - 2x_2 + 5 \leq 0 \\ \lambda_1 \geq 0, \quad \lambda_2 \geq 0 \\ \lambda_1(x_1 + x_2 - 3) = 0, \quad \lambda_2(-x_1 - 2x_2 + 5) = 0 \end{cases}\)
步骤3:分情况讨论
情况1:$\lambda_1 = 0, \lambda_2 = 0$
- 从KKT条件得:$x_1 = 2, x_2 = 1$
- 检查约束:$g_1(2,1) = 0 \leq 0$,$g_2(2,1) = 1 > 0$
- 结论:不满足约束,舍去
情况2:$\lambda_1 = 0, \lambda_2 > 0$
- 从互补松弛性:$-x_1 - 2x_2 + 5 = 0$,即 $x_1 + 2x_2 = 5$
- 从KKT条件:$2x_1 - 4 - \lambda_2 = 0$,$4x_2 - 4 - 2\lambda_2 = 0$
- 解得:$x_1 = \frac{7}{3}, x_2 = \frac{4}{3}, \lambda_2 = \frac{2}{3}$
- 检查约束:$g_1(\frac{7}{3}, \frac{4}{3}) = \frac{2}{3} > 0$
- 结论:不满足约束,舍去
情况3:$\lambda_1 > 0, \lambda_2 = 0$
- 从互补松弛性:$x_1 + x_2 - 3 = 0$,即 $x_1 + x_2 = 3$
- 从KKT条件:$2x_1 - 4 + \lambda_1 = 0$,$4x_2 - 4 + \lambda_1 = 0$
- 解得:$x_1 = 2, x_2 = 1, \lambda_1 = 0$
- 结论:与假设 $\lambda_1 > 0$ 矛盾,舍去
情况4:$\lambda_1 > 0, \lambda_2 > 0$
- 从互补松弛性:$x_1 + x_2 = 3$ 且 $x_1 + 2x_2 = 5$
- 解得:$x_1 = 1, x_2 = 2$
- 从KKT条件:$\lambda_1 = 8, \lambda_2 = 6$
- 检查约束:$g_1(1,2) = 0 \leq 0$,$g_2(1,2) = 0 \leq 0$
- 结论:满足所有条件
步骤4:计算目标函数值 \(f(1,2) = 1^2 + 2(2)^2 - 4(1) - 4(2) = 1 + 8 - 4 - 8 = -3\)
结论:最优解为
六、二阶最优性条件
6.1 二阶必要条件
设 $x^*$ 是约束优化问题的局部最优解,且满足KKT条件,则对于所有满足以下条件的 $d \neq 0$:
- \(\nabla g_i(x^*)^T d = 0\) 对所有 \(i \in \mathcal{A}(x^*)\)(起作用的不等式约束)
- \(\nabla h_j(x^*)^T d = 0\) 对所有 \(j = 1, \ldots, q\)(等式约束)
有: \(d^T \nabla^2 L(x^*, \lambda^*, \nu^*) d \geq 0\)
其中 \(\nabla^2 L(x^*, \lambda^*, \nu^*)\) 是拉格朗日函数关于 \(x\) 的Hessian矩阵。
6.2 二阶充分条件
设 $x^*$ 满足KKT条件,且对于所有满足上述条件的 $d \neq 0$,有: \(d^T \nabla^2 L(x^*, \lambda^*, \nu^*) d > 0\)
则 $x^*$ 是严格局部最优解。
6.3 正则点
定义:设 $x^$ 是约束优化问题的可行点,如果所有起作用约束的梯度线性无关,则称 $x^$ 为正则点。
重要性:正则点是KKT条件成立的重要前提条件。
6.4 二阶条件应用实例
问题:考虑优化问题 \(\begin{align} \min \quad & f(x_1, x_2) = x_1 \\ \text{s.t.} \quad & g(x_1, x_2) = 3(x_1-3)^2 + x_2 \geq 0 \\ & h(x_1, x_2) = (x_1-3)^2 + x_2^2 - 10 = 0 \end{align}\)
判断点 $x^{(1)} = (2, -3)^T$ 是否为局部最优解。
解:
步骤1:构造拉格朗日函数 \(L(x_1, x_2, \lambda, \mu) = x_1 - \lambda[3(x_1-3)^2 + x_2] - \mu[(x_1-3)^2 + x_2^2 - 10]\)
步骤2:计算梯度 \(\nabla f(x) = \begin{pmatrix} 1 \\ 0 \end{pmatrix}, \quad \nabla g(x) = \begin{pmatrix} 6(x_1-3) \\ 1 \end{pmatrix}, \quad \nabla h(x) = \begin{pmatrix} 2(x_1-3) \\ 2x_2 \end{pmatrix}\)
步骤3:在点 $x^{(1)} = (2, -3)^T$ 处计算梯度 \(\nabla f(2, -3) = \begin{pmatrix} 1 \\ 0 \end{pmatrix}, \quad \nabla g(2, -3) = \begin{pmatrix} -6 \\ 1 \end{pmatrix}, \quad \nabla h(2, -3) = \begin{pmatrix} -2 \\ -6 \end{pmatrix}\)
步骤4:检查KKT条件 \(\nabla f(2, -3) - \lambda \nabla g(2, -3) - \mu \nabla h(2, -3) = \begin{pmatrix} 1 \\ 0 \end{pmatrix} - \lambda \begin{pmatrix} -6 \\ 1 \end{pmatrix} - \mu \begin{pmatrix} -2 \\ -6 \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \end{pmatrix}\)
得到方程组: \(\begin{cases} 1 + 6\lambda + 2\mu = 0 \\ -\lambda + 6\mu = 0 \end{cases}\)
解得:$\lambda = -\frac{3}{19} < 0$,$\mu = -\frac{1}{38}$
步骤5:判断KKT条件 由于 $\lambda < 0$ 违反了KKT条件中的对偶可行性条件($\lambda \geq 0$),因此 $x^{(1)} = (2, -3)^T$ 不满足KKT条件。
结论:$x^{(1)} = (2, -3)^T$ 不是局部最优解。
七、KKT条件的特殊情况
7.1 只有不等式约束
当 $q = 0$(无等式约束)时,KKT条件简化为: \(\begin{cases} \nabla f(x^*) + \sum_{i=1}^p \lambda_i^* \nabla g_i(x^*) = 0 \\ g_i(x^*) \leq 0, \quad i = 1, \ldots, p \\ \lambda_i^* \geq 0, \quad i = 1, \ldots, p \\ \lambda_i^* g_i(x^*) = 0, \quad i = 1, \ldots, p \end{cases}\)
7.2 只有等式约束
当 $p = 0$(无不等式约束)时,KKT条件简化为拉格朗日乘数法: \(\begin{cases} \nabla f(x^*) + \sum_{j=1}^q \nu_j^* \nabla h_j(x^*) = 0 \\ h_j(x^*) = 0, \quad j = 1, \ldots, q \end{cases}\)
7.3 凸优化问题
对于凸优化问题,KKT条件不仅是必要条件,也是充分条件。如果目标函数和约束函数都是凸函数,则满足KKT条件的点就是全局最优解。
八、KKT条件的计算步骤
8.1 一般计算流程
- 构造拉格朗日函数
- 写出KKT条件
- 分析约束的起作用情况
- 求解方程组
- 验证解的可行性
8.2 注意事项
- 约束条件:确保LICQ等约束条件得到满足
- 乘子符号:不等式约束的乘子必须非负
- 互补松弛性:不起作用的约束对应的乘子为零
- 唯一性:KKT条件提供的是必要条件,不是充分条件
九、KKT条件的实际应用
9.1 支持向量机
在支持向量机中,KKT条件用于:
- 确定支持向量
- 计算最优分离超平面
- 理解软间隔分类器
相关文章: